
.
Sensor de fuerza (FSR402)
Indice
- sensor de fuerza cona aduino
1.sensor de fuerza con arduino
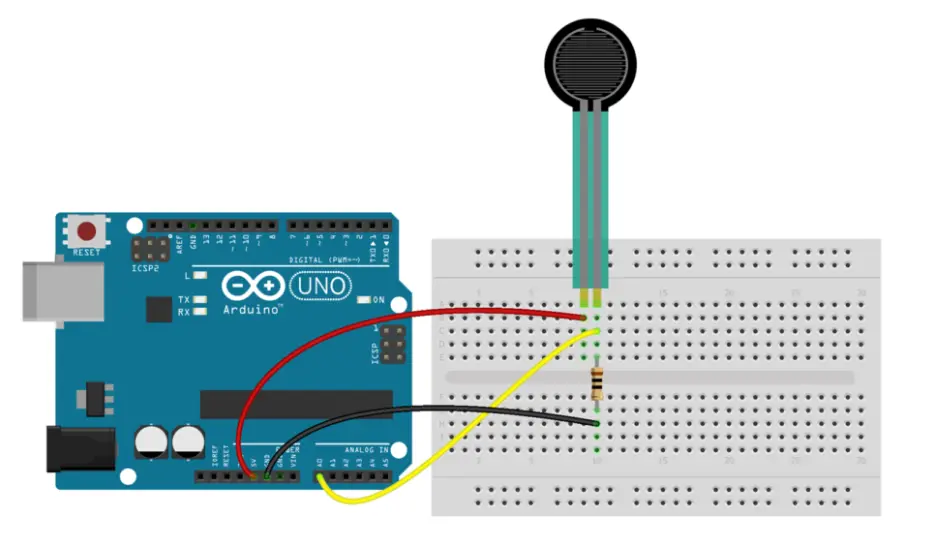
#define PIN_SENSOR_FUERZA A0 // El sensor FSR y la resistencia de 10K están conectados a A0
void setup() {
Serial.begin(9600); // Inicializar la comunicación serial a 9600 baudios
}
void loop() {
// Leer el valor analógico del sensor de fuerza
int lecturaAnalogica = analogRead(PIN_SENSOR_FUERZA);
// Mostrar el valor leído por el monitor serie
Serial.print("Lectura del sensor de fuerza = ");
Serial.print(lecturaAnalogica); // Imprimir el valor analógico crudo (0-1023)
// Clasificar la presión según el valor leído:
if (lecturaAnalogica < 10) // de 0 a 9
Serial.println(" -> sin presión");
else if (lecturaAnalogica < 200) // de 10 a 199
Serial.println(" -> toque ligero");
else if (lecturaAnalogica < 500) // de 200 a 499
Serial.println(" -> presión suave");
else if (lecturaAnalogica < 800) // de 500 a 799
Serial.println(" -> presión media");
else // de 800 a 1023
Serial.println(" -> presión fuerte");
delay(1000); // Esperar 1 segundo entre cada lectura
}Explicación del funcionamiento:
Sensor de Fuerza (FSR – Force Sensing Resistor):
- Un FSR cambia su resistencia cuando se aplica presión
- A mayor presión → menor resistencia → mayor valor analógico
- Se usa con una resistencia de 10kΩ a tierra (divisor de voltaje)
Circuito recomendado:
text
5V
|
FSR
|
+-----> A0 (lectura analógica)
|
10kΩ
|
GND
Rangos de presión:
| Valor analógico | Nivel de presión | Aplicación típica |
|---|---|---|
| 0 – 9 | Sin presión | Sensor sin tocar |
| 10 – 199 | Toque ligero | Toque muy suave |
| 200 – 499 | Presión suave | Agarrar un objeto delicado |
| 500 – 799 | Presión media | Apretar un botón |
| 800 – 1023 | Presión fuerte | Agarrar con fuerza |
Salida en el Monitor Serie:
text
Lectura del sensor de fuerza = 5 -> sin presión Lectura del sensor de fuerza = 45 -> toque ligero Lectura del sensor de fuerza = 350 -> presión suave Lectura del sensor de fuerza = 650 -> presión media Lectura del sensor de fuerza = 950 -> presión fuerte
Aplicaciones comunes:
- Instrumentos musicales sensibles al tacto
- Control de agarre en prótesis robóticas
- Interfaces de usuario por presión
- Básculas y medición de peso (con calibración)
- Sistemas de detección de presencia
- Controladores para juegos
- Terapia física y rehabilitación (medir fuerza de agarre)
Mejoras posibles:
cpp
// Agregar calibración y mapeo a peso real (necesita pruebas)
#define PIN_SENSOR_FUERZA A0
int valorMinimo = 1023; // Para calibración
int valorMaximo = 0;
void setup() {
Serial.begin(9600);
// Calibración: pedir que no toquen el sensor por 3 segundos
Serial.println("No tocar el sensor durante 3 segundos...");
delay(3000);
for(int i = 0; i < 100; i++) {
int lectura = analogRead(PIN_SENSOR_FUERZA);
if(lectura < valorMinimo) valorMinimo = lectura;
if(lectura > valorMaximo) valorMaximo = lectura;
delay(20);
}
Serial.print("Rango calibrado: ");
Serial.print(valorMinimo);
Serial.print(" - ");
Serial.println(valorMaximo);
}
void loop() {
int lectura = analogRead(PIN_SENSOR_FUERZA);
// Mapear a porcentaje de presión (0-100%)
int porcentaje = map(lectura, valorMinimo, valorMaximo, 0, 100);
porcentaje = constrain(porcentaje, 0, 100); // Limitar entre 0 y 100
Serial.print("Presión: ");
Serial.print(porcentaje);
Serial.println("%");
// Visualización con barra ASCII
Serial.print("[");
for(int i = 0; i < porcentaje / 5; i++) {
Serial.print("=");
}
for(int i = porcentaje / 5; i < 20; i++) {
Serial.print(" ");
}
Serial.println("]");
delay(100);
}
Características del FSR típico (ejemplo: FSR-402):
- Rango de fuerza: 0.1N a 100N (aprox. 0 a 10 kg)
- Resistencia sin presión: > 10 MΩ
- Resistencia con presión máxima: ~200 Ω
- Diámetro: 1.5 cm a 5 cm (según modelo)
- Tiempo de respuesta: < 1 ms
Notas importantes:
- Los FSR no son precisos para medidas exactas de peso
- Son cualitativos, no cuantitativos (buenos para detectar tendencias)
- La lectura puede variar con la temperatura
- La superficie de contacto afecta la lectura (usar un émbolo de goma para mejor consistencia)
- La resistencia pull-down de 10kΩ es crítica para el funcionamiento correcto